Software steps
Tools
- Computer
Materials
- materialsfor
Turn on the X-OSC either by turning on the PushPull (if already inserted), or by adding a battery/usb connection and join the X-OSC’s ad-hoc network.
Point your browser to the IP address
http://169.254.1.1/
and fill in the following details:
OSC remote IP 57120
Inputs
pin 1 serial
pin 2 serial
Output
pin 1 RGB
Serial
pin 1 (serial capsense)
baud rate 115200
buffer size 128
timeout 16
framing byte 10
Input
pin 2 (serial buttons and encoder)
baud rate 115200
buffer size 128
timeout 16
framing byte 10
IMU 50 Hz
You can either use the PushPull in ad-hoc network mode or with a dedicated router (advised) and WiFi network. For this you have to configure the X-OSC accordingly.
The following configuration worked for us:
On computer
Configure IPv4: Manually
Select an IP address between .10 and .99:
IP address: 192.168.002.50
Subnet mask: 255.255.255.0
Router: <empty>
On X-OSC
IP address: 192.168.002.05
On your computer, connect to WiFi (or alternatively via ethernet) with the same credentials as given for the X-OSC boards. Select either a static unique IP address, or wait a bit to get one assigned from the X-OSC DHCP server. A static IP is preferable, since it means you can send messages to other computers as well (for which you only need to know their IP address).
TODO: add contact information.
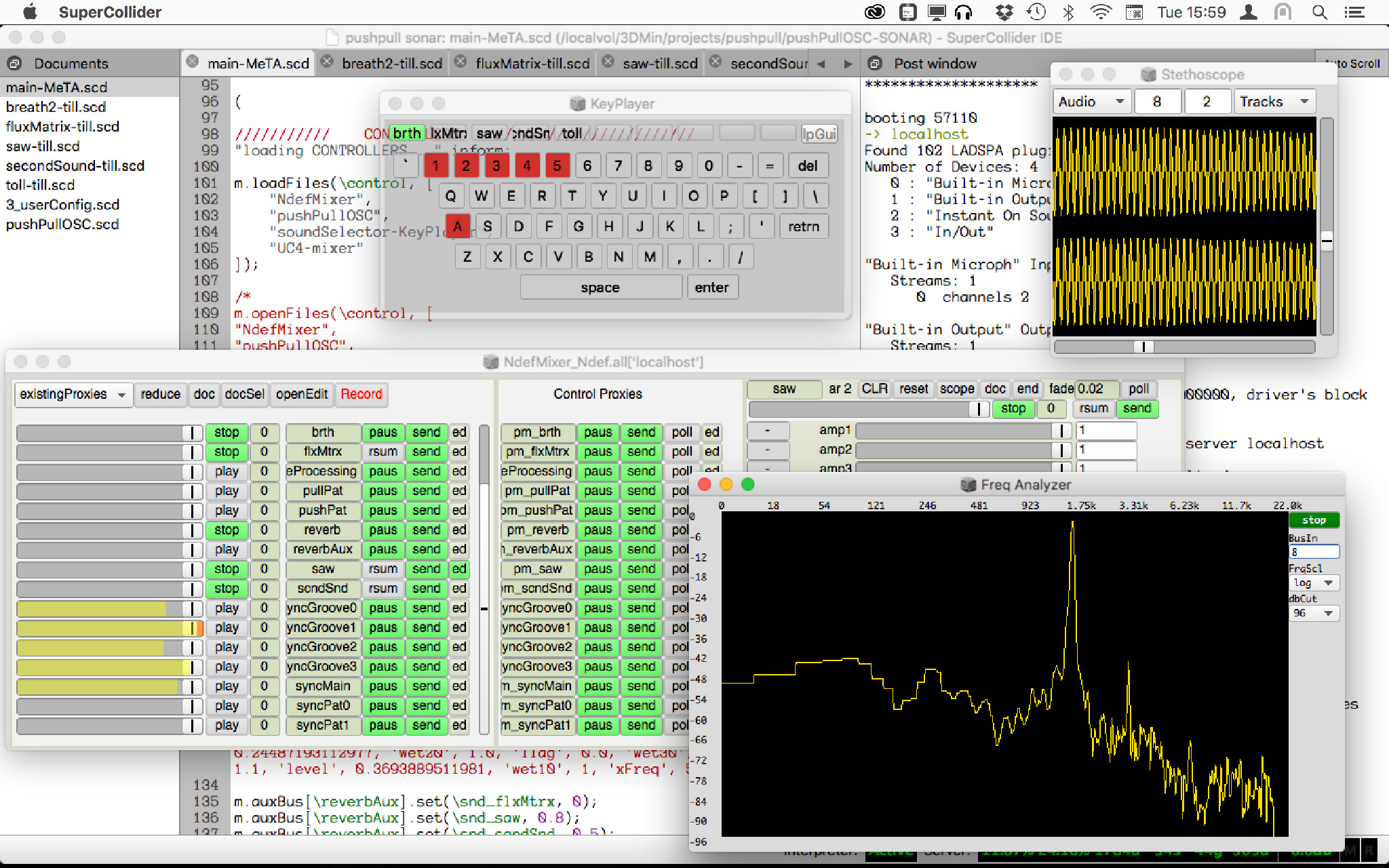 The SuperCollider program for PushPull.
The SuperCollider program for PushPull.
PushPull’s software is based on SuperCollider. Download it from github.
The PushPull quark contains the source code to get you started with PushPull. It contains dependencies to required quarks, among others:
You can install this from within SuperCollider by evaluating
Quarks.install("pushPull");
This should also take care of dependencies. If it fails, add them manually by evaluating
Quarks.install("Modality-toolkit");
Quarks.install("MeTA");
Quarks.install("Keyplayer");
Quarks.install("JITLibExtensions");
Finally, clone or download the PushPull performance barebone from its github repository. The main file is main-PushPull.scd.
PushPull uses the MeTA framework to organise patches. Open the file main-PushPull.scd and evaluate the code in the brackets.
If you want to get lower-level access, have a look at the help-files for the classes PushPullOSC_SE and PushPullOSC. A parser for the capsense board (if connected directly to the computer via serial-USB) is implemented in the class CapSense.